基于二维图像集合的三维内容学习与生成
童欣(xtong@microsoft.com)
- Deep learning has demonstrated its great advantages in many fields
- Unified network architecture for different representations and tasks
- Compact non-linear approximator for arbitrary functions
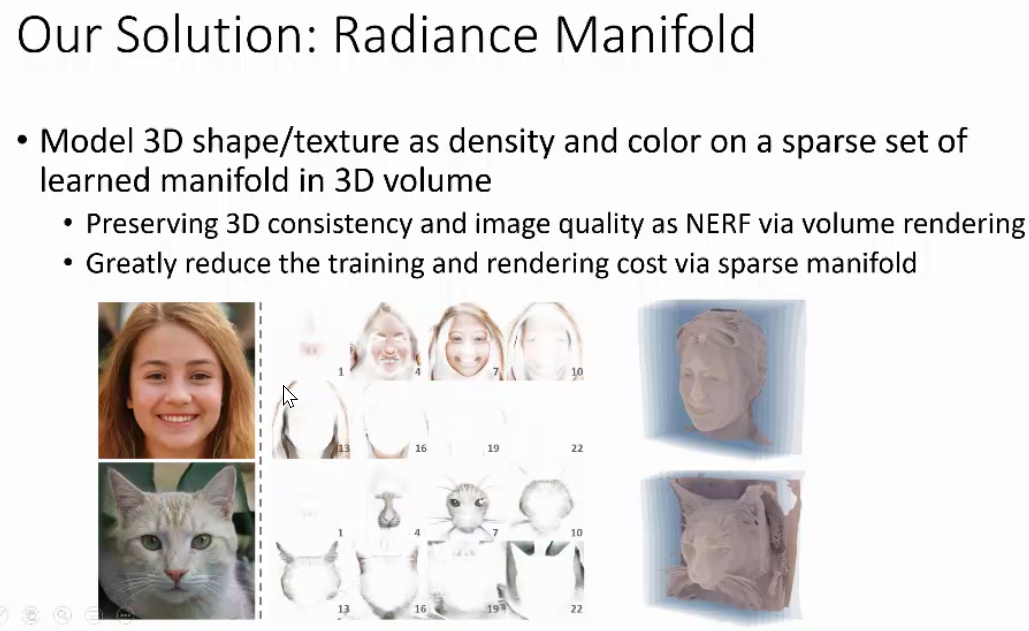
Learning 3D representations from 2D image collections
- Exploiting huge amount of images/video datasets
- Learn high quality 3D representation from realistic images
- From image to 3D representation is a highly ill-posed problem
- No multiple views and no correspondence between images
Two Solutions
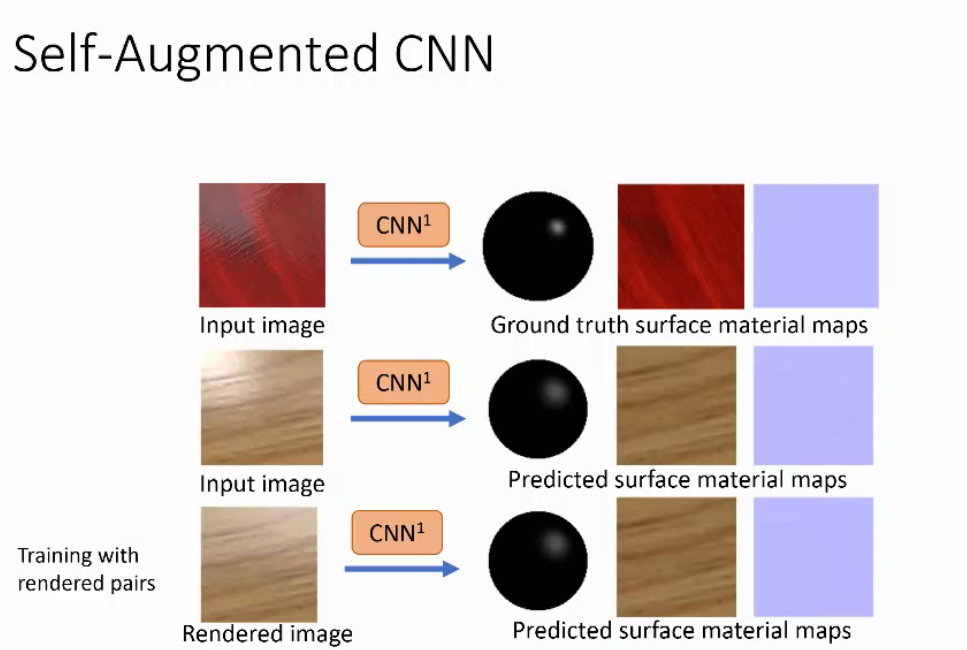
Learning by synthesis
- Learning a network to infer
- underlying 3D representation from each 2D image
- The rendering of the derived 3D representation should match the input 2D image
- How to solve the ill-posed inverse rendering problem?
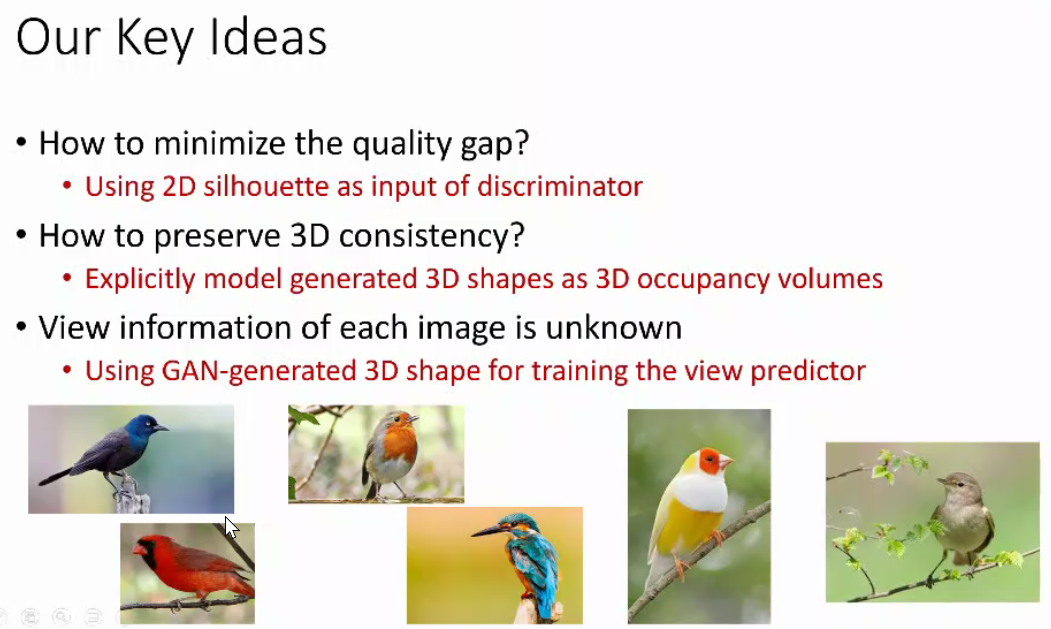
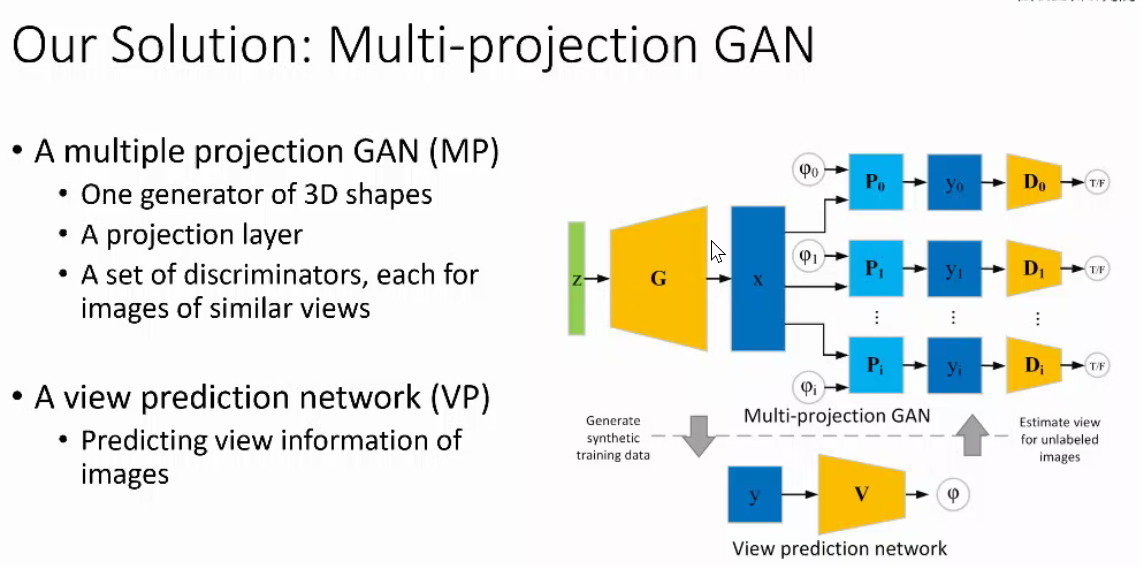
Learning by discrimination
- Learning a generative model of the space of 3D representations from 2D images.
- The rendering of generated 3D representation from each view should be indistinguishable from 2D real.
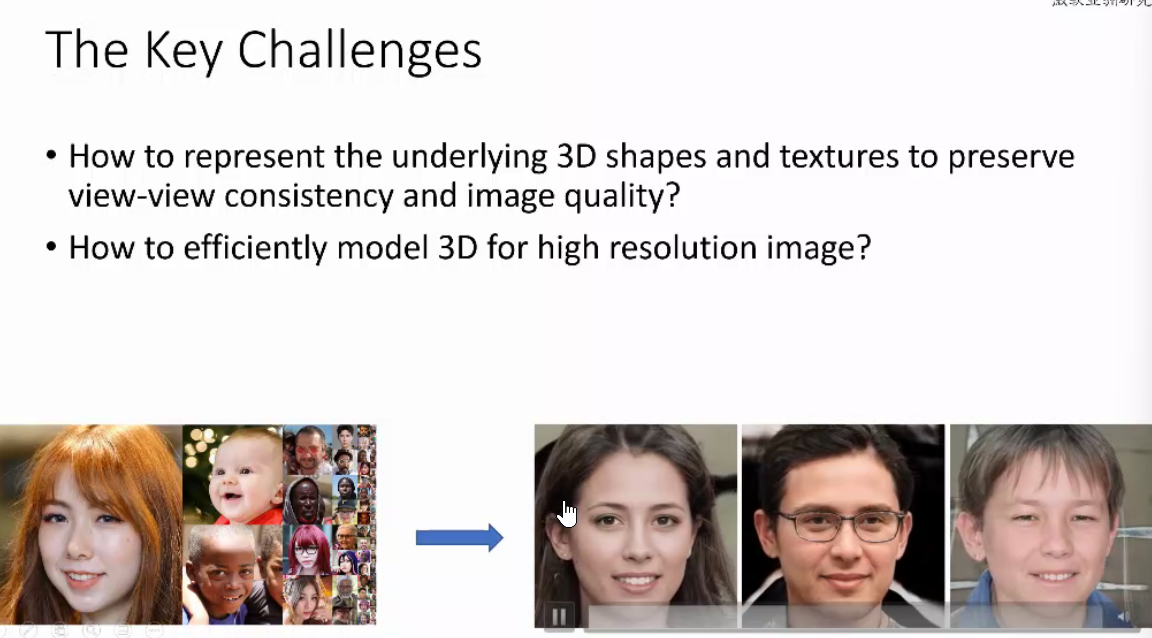
- How to minimize the quality gap between synthesized images and real ones and preserve 3D consistency?
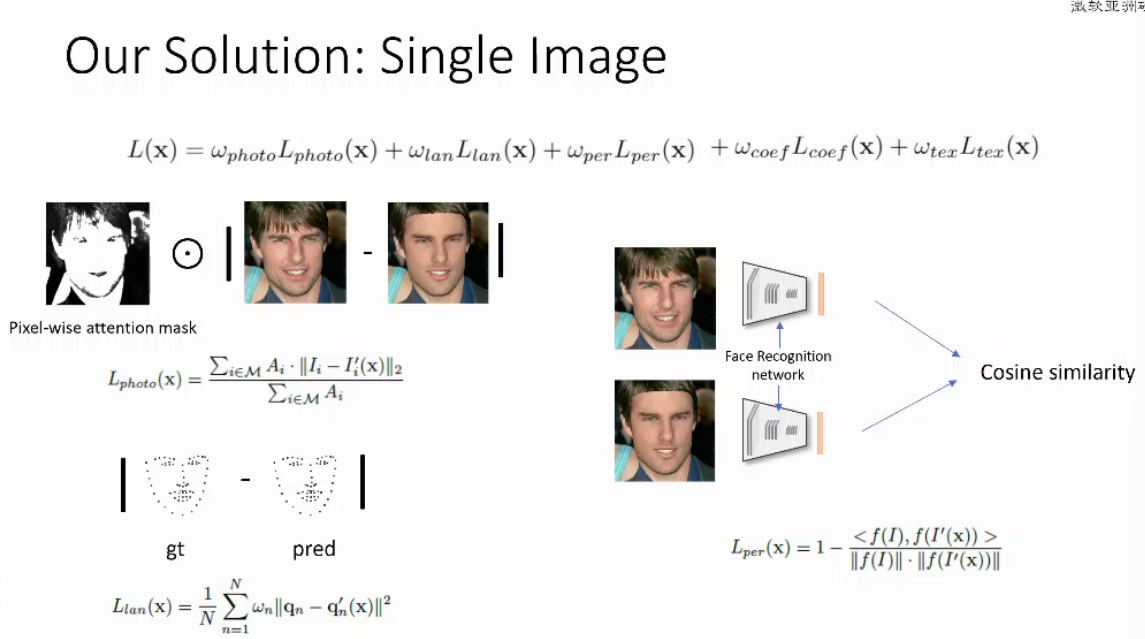
采用多幅图像对三维人脸进行生成
- 3D scene layout generation from RGB/RGBD image collections(Mingjia Yang, Yuxiao Guo, Bin Zhou, Xin Tong, Indoor Scene Generation from a Collection of Semantic-segmented Depthemages,ICCV 2021.)
- 3D object texture generation from real image collections(Rui Yu, Yue Dong, Pieter Peers, Xin Tong, Learning Texture Generators for 3D Shape Collections from internet Photo Sets, BMVC 2021.)
陈宝权教授的三位讲者报告:

Simulation and Optimization of Magneto elastic Thin Shells
JOINT NEURAL PHASE RETRIEVAL AND COMPRESSION FOR ENERGY-AND COMPUTATION-EFFICIENT HOLOGRAPHY ON THE EDGE
复杂三维形状的生成、分析与制造
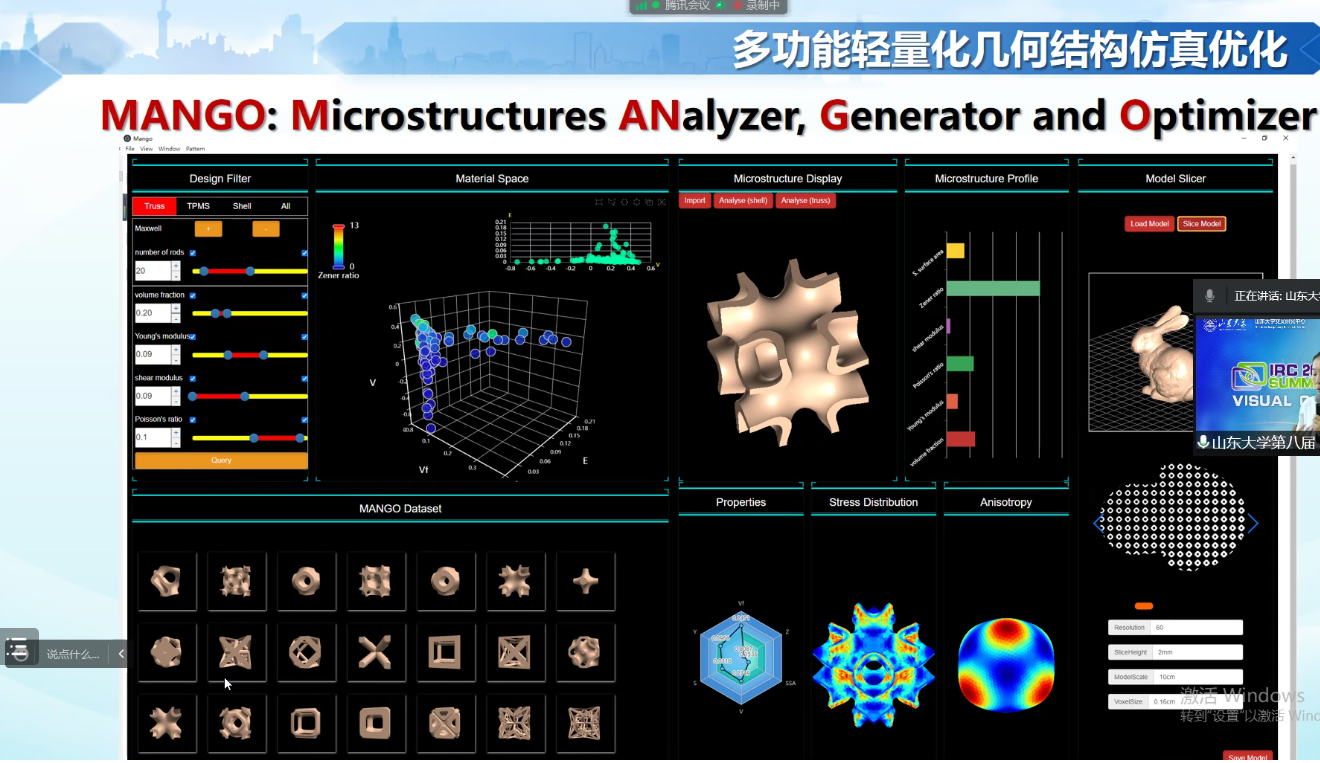
轻质与可控弹性耦合的微几何结构仿真设计与优化
基于深度学习的无标签高泛化的快速均质化方法
面向制造的高保真几何结构优化:
提出了制造约束与复杂几何结构的共分析方法,解决增材制造中因打印精度、局部重力、分块拼接等造成的几何形状走样,克服了大体积或高度复杂结构如植物、毛发等在制造中的失真问题。
三维物体跟踪与增强现实(钟凡)
基本原理
PnP(Perspective-n-Points)问题
SIFT基于局部特征得到点对应
无纹理物体——利用轮廓形状信息(边缘信息与图像信息)
三维位姿优化
混合优化方法:只对面外旋转采用非局部搜索
可视化
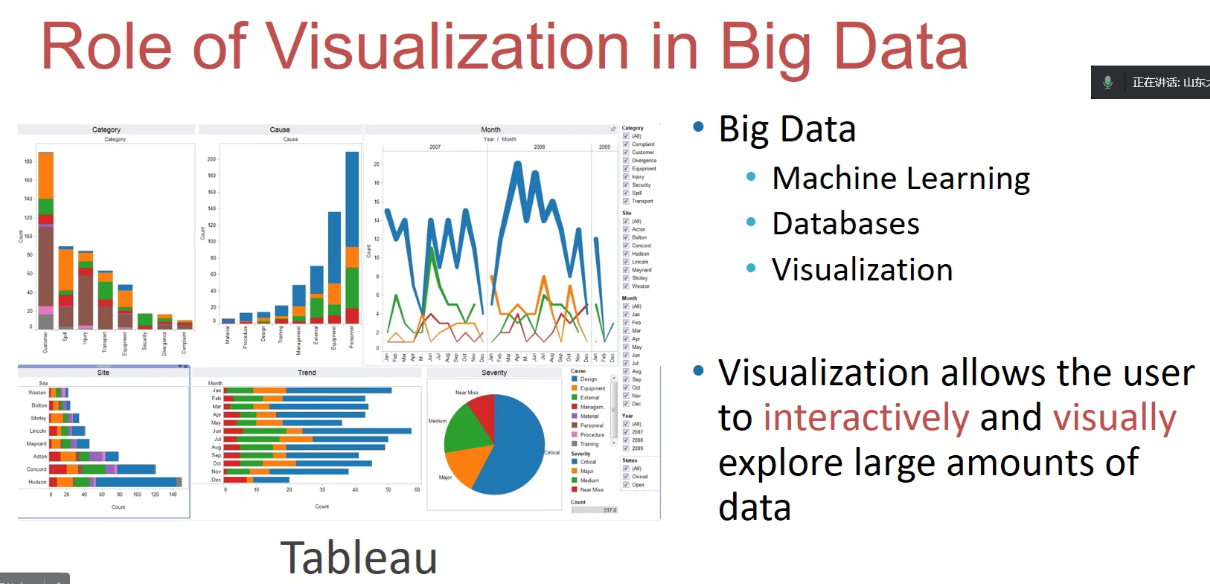
tableau
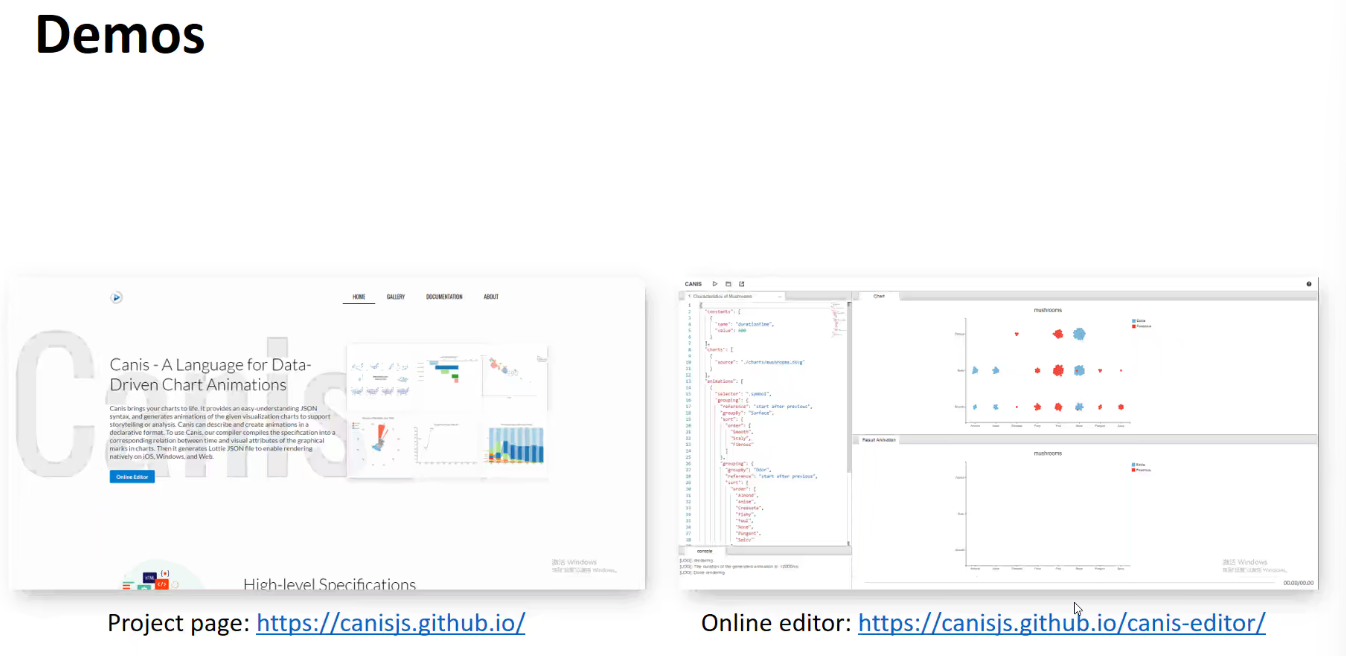
Canis - A Language for Data-Driven Chart Animations
Deep Dive: Sampling for Progressive Visualization
Deformation of 3D Printed Soft Robots: Sensing, Simulation and Control(Charlie C.L.Wang)
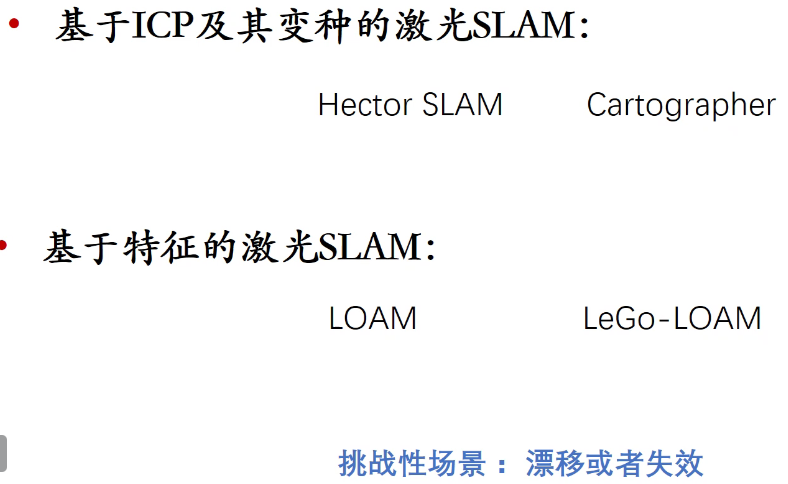
多模态信息感知的SLAM
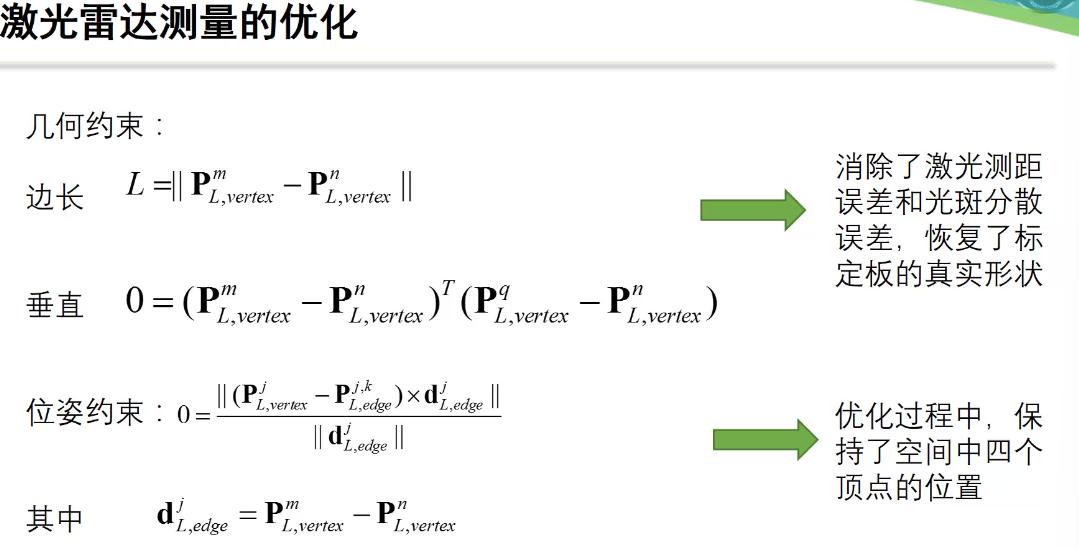
特征点优化的相机与激光外参数标定
两阶段视角不变匹配法的激光SLAM
基于凸优化与IMU-KLT线段跟踪的点线SLAM
SLAM特征跟踪中存在问题:
在弱纹理、重复纹理、运动模糊、光照变化下,鲁棒性和精度较低
基于线的跟踪速度较慢
解决思路∶
- 提出了点线特征混合策略:Point line with shorter tracks are categorized into “MSCKF”features and with longer tracks into ““SLAM”features.Especially,“SLAM” lines are added into the state vector toimprove accuracy of the proposed system.
- 提出了基于L1-范数图优化的线段跟踪
- 实验效果优于VINS-Mono,PL-VINS,OpenVINS
- 在运动模糊和弱纹理场景下,实验效果优于ORB-SLAM3.
基于深度哈希学习的SLAM闭环检测与位姿误差纠正
基于随机森林学习与二值描述子学习相融合的并行搜索SLAM重定位
软硬协同SLAMI展示和展望
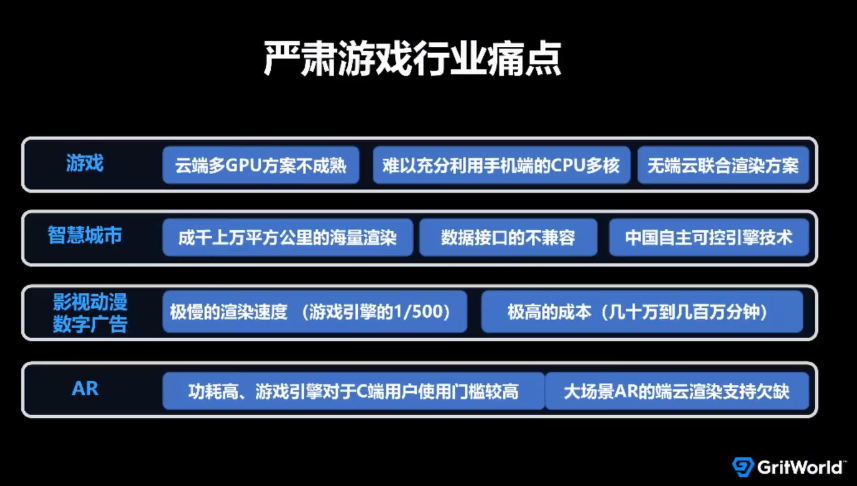
严肃化和泛化的游戏引擎技术
游戏化的xr工作——GritWorld

异构维度数据可视化应用的高效一体化构建方法(HUAWEI)
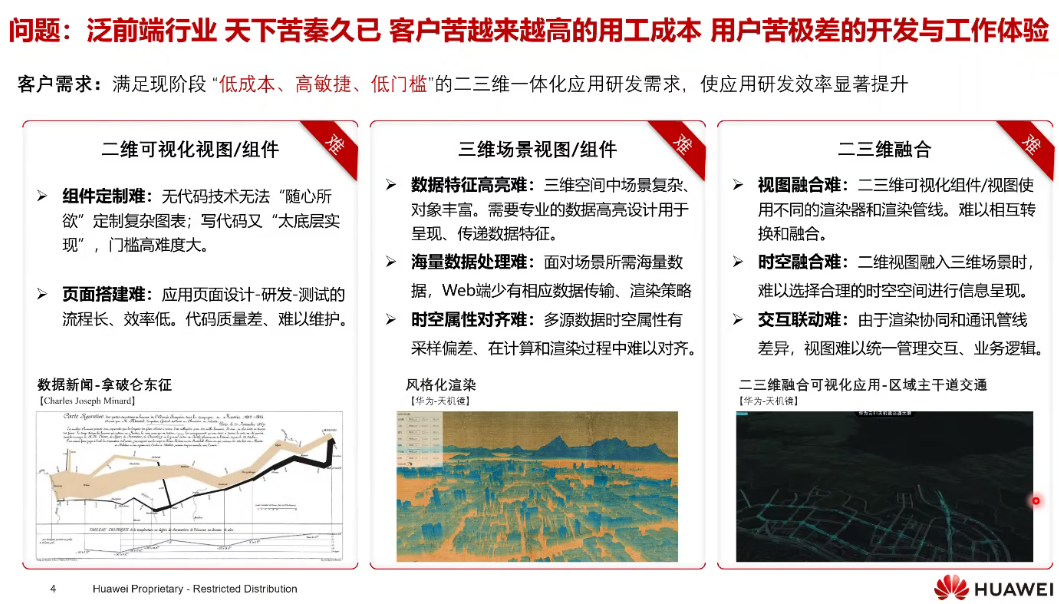
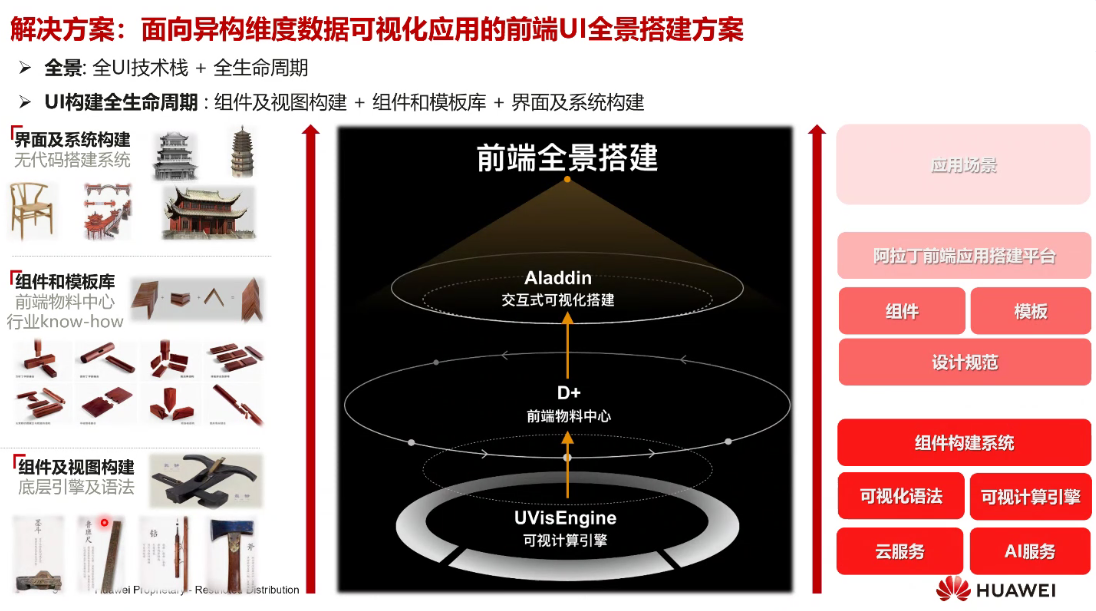
1.Aladdin定位:面向WEB应用的端到端智能无代码人机协同系统构建平台
- 生成既有静态页面、交互、业务逻辑与数据表达的全场景WEB应用
- 彻底打通从需求到设计到开发的全链路
2.Aladdin二维组件编辑方案:声明式语法、交互构建界面
3.Aladdin UVE Kernel三维编辑器
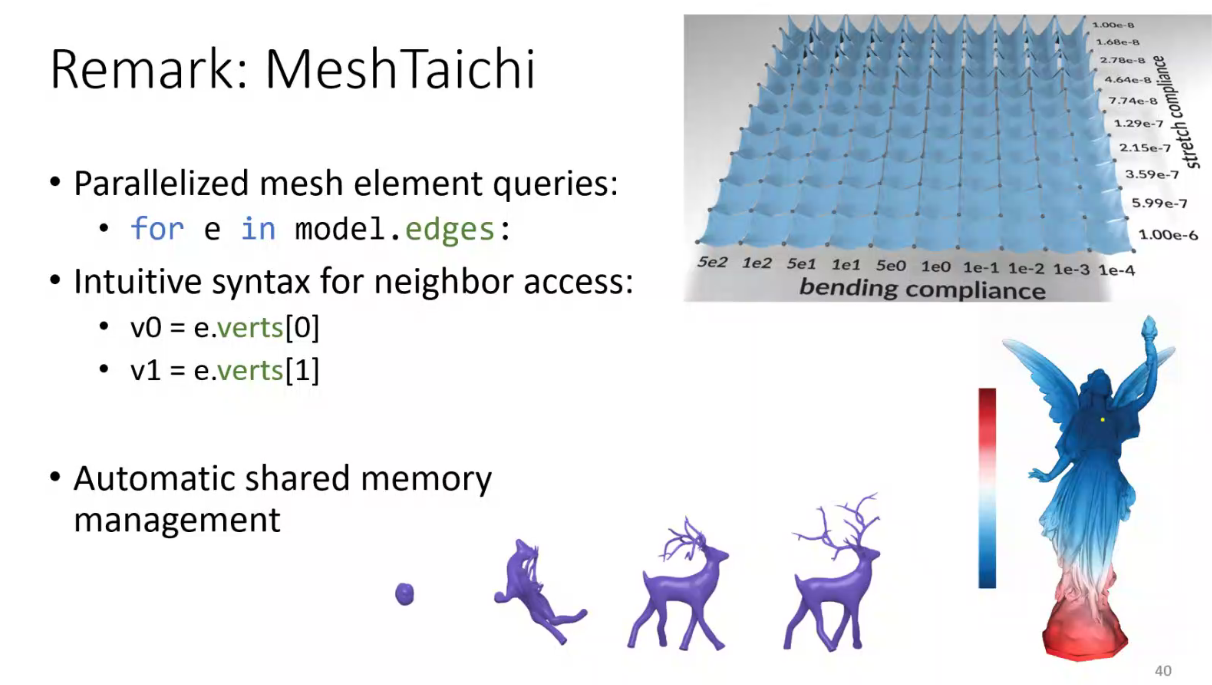
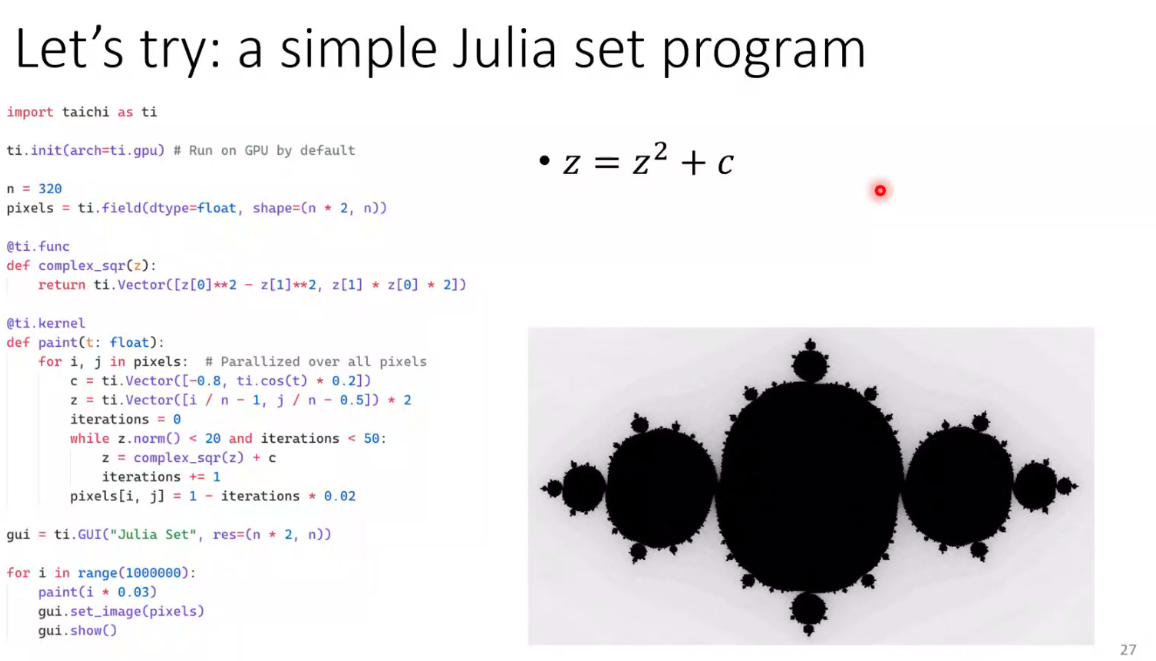
Taichi编程语言
1 | #使用 |
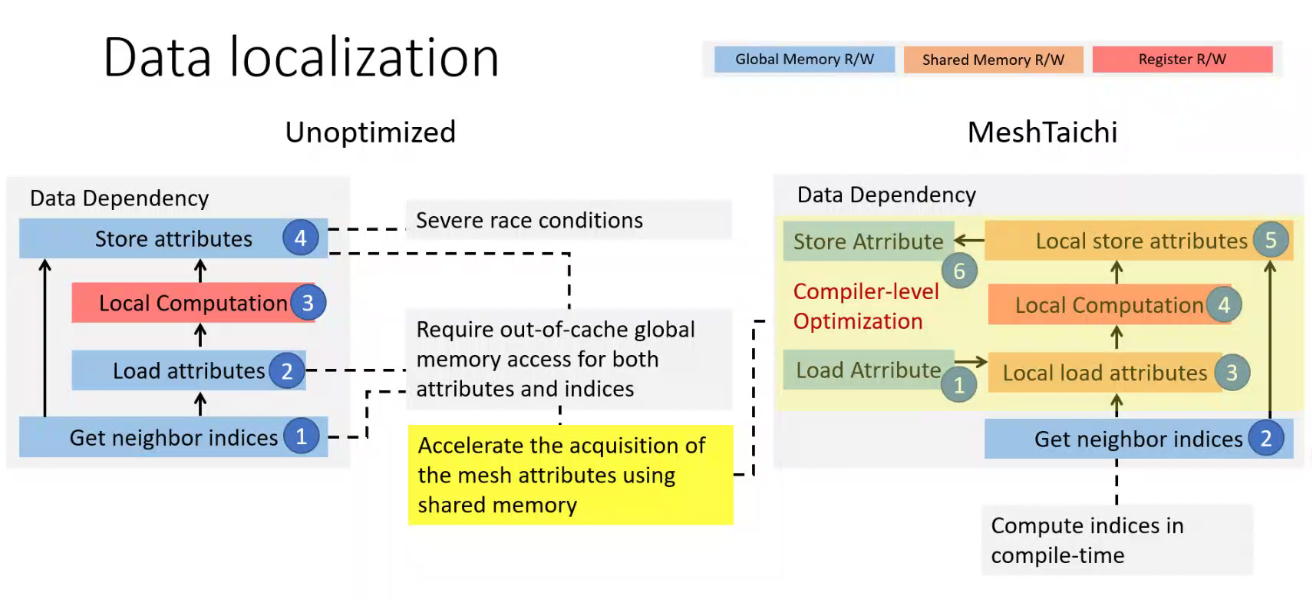
作用:在图上优化代码